
Большая Энциклопедия Нефти и Газа
Устранение — избыточная связь
Устранение избыточных связей способствует повышению КПД путем уменьшения вредных сопротивлений относительному движению звеньев механизма и может достигаться различными конструктивными приемами. Так, например, избыточные связи плоского четырехшарнирника ( рис. 2.8) могут быть исключены заменой вращательных кинематических пар А и В, ограничивающих шатун, сферическими кинематическими парами. [2]
Устранение избыточных связей требует уменьшения класса кинематических пар. В остальных случаях снижение класса кинематических пар может привести к парам с линейчатым и даже точечным контактом, которые непригодны для передачи больших сил и моментов. [3]
Устранение избыточных связей в центробежных регуляторах кроме обычных выгод дает еще уменьшение трения, а следовательно, уменьшение нечувствительности регуляторов, что очень важно. [5]
Устранение избыточных связей выполняется изменением подвижностей отдельных кинематических пар, причем для одного и того же механизма с избыточными связями можно найти несколько вариантов механизмов без избыточных связей. [6]
Устранение избыточных связей способствует повышению коэффициента полезного действия путем уменьшения вредных сопротивлений относительному движению звеньев механизма и может достигаться различными конструктивными приемами. Так, например, избыточные связи плоского четырехшарнирника ( см. рис. 2.11, а) могут быть исключены заменой вращательных кинематических пар, ограничивающих шатун сферическими кинематическими парами. После такой замены ранг механизма оказывается равным шести, а количество избыточных связей — равным нулю. [7]
Для устранения избыточных связей ( случай небольшого угла между осями) очень удобен зубчатый кардан. В зубчатых карданах для удобства изготовления применяют эвольвентное зацепление. Внутренний венец выполняют зубодолблением. На внешнем венце делают бочкообразный зуб. Однако они являются избыточными связями в кинематической паре, которую можно выполнить очень точно ( например, одинаковый шаг зубьев), поэтому эти избыточные связи не вредны и их подсчитывать не требуется. Вредными являются избыточные связи в механизме, где на распределение нагрузок влияют размеры многих звеньев и может иметь место суммирование ошибок изготовления. [8]
Для устранения избыточных связей в соединении должно быть по две подвижности каждого вида. Если это требование выполнено, то опорные точки в координатных плоскостях расположены правильно. [9]
В мостах устранение избыточных связей позволяет избежать вредных напряжений при неравномерной осадке опор и неравномерном нагреве от солнца ферм и проезжей части. [10]
Еще один путь устранения избыточных связей в одинарной зубчатой передаче с линейчатым контактом зубьев — это соединить венец одного из колес со ступицей с помощью шлицевой пары IV5, подвижность увеличится на единицу и будет равна двум. [12]
Вертикальная подвижность нужна для устранения избыточных связей , так как шкворень веса кузова не передает. Продольной подвижности нет, так как в этом направлении передается тяговое усилие. Подвижность вокруг вертикальной оси нужна для поворота тележки; подвижность вокруг поперечной оси — для правильного распределения нагрузки между осями ( коле-сами); подвижность вокруг продольной оси — для устранения избыточных связей. [13]
Возможны и другие варианты устранения избыточных связей в шарнирном четырехзвеннике. Следовательно, в этом механизме, как в любом другом механизме с избыточными связями, нельзя указать, какая именно связь является избыточной. [14]
Источник
Выявление в механизме избыточных связей и их устранение
Для повышения надежности рекомендуется применять статически определимые механизмы, т.е. без избыточных (пассивных) связей. Такие механизмы называют рациональными. Избыточные связи – это связи, устранение которых не увеличивает подвижности механизма. Они вредны, так как увеличивают требования к точности изготовления звеньев, снижают надежность работы механизма.
Проверить механизм на наличие в нем избыточных связей можно путем подсчета их по структурным формулам, одна из которых предложена А. П. Малышевым: q=w+5p5+4p4+3p3+2p2+p1-6n, где q – число избыточных связей; w – степень подвижности механизма; n – число подвижных звеньев; p5 – число кинематических пар 5-го класса; p4 – число кинематических пар 4-го класса; p3 – число кинематических пар 3-го класса; p2 – кинематические пары 2-го класса; p1 – кинематические пары 1-го класса.
Другую формулу предложил О. Г. Озол:
 ,
,
где к – число независимых контуров в механизме
 ;
;
h – суммарное число подвижностей, допускаемых кинематическими парами механизма  .
.
При конструировании рационального механизма надо уметь определить, в каком замкнутом контуре имеются избыточные связи и какие они. При этом используется матричный метод определения структурных свойств механизма.
Матричное уравнение для определения избыточных связей механизма:  , где
, где  ;
;  ;
;  , Q – матрица избыточных связей механизма. Отрицательные элементы этой матрицы показывают избыточные связи, положительные – не выявленные подвижности; Н – суммарная матрица подвижностей в кинематических парах. WO – суммарная матрица общих подвижностей; WM – суммарная матрица местных подвижностей звеньев; n, p, m – число подвижных звеньев, кинематических пар и начальных звеньев в механизме; Нi – матрица подвижности i – й кинематической пары, где переменные tx, ty, tz показывают число поступательных подвижностей вдоль осей X,Y,Z.
, Q – матрица избыточных связей механизма. Отрицательные элементы этой матрицы показывают избыточные связи, положительные – не выявленные подвижности; Н – суммарная матрица подвижностей в кинематических парах. WO – суммарная матрица общих подвижностей; WM – суммарная матрица местных подвижностей звеньев; n, p, m – число подвижных звеньев, кинематических пар и начальных звеньев в механизме; Нi – матрица подвижности i – й кинематической пары, где переменные tx, ty, tz показывают число поступательных подвижностей вдоль осей X,Y,Z.
Переменные rx, ry, rz показывают число вращательных подвижностей вокруг осей X,Y,Z:
 .
.
WOj – матрица общих подвижностей j–го начального звена (множество ее компонентов, равных единице, является подмножеством равных единице компонентов матрицы подвижностей кинематической пары, связывающей j – е начальное звено и стойку); WMl – матрица местных подвижностей l – го звена. F – единичная матрица замыкания контура (матрица подвижностей свободного твердого тела):
 .
.
Для устранения избыточных связей следует заменить отсутствующие поступательные и вращательные подвижности имеющимися поступательными и вращательными подвижностями вдоль осей, не перпендикулярных направлениям отсутствующих подвижностей. Кроме того, отсутствующие поступательные подвижности необходимо заменить имеющимися в наличии вращательными.

Таким образом, в матрице подвижностей отрицательные элементы первого столбца могут быть заменены положительными элементами второго столбца, лежащими в других строках:
Для механизмов, в которых используются кинематические пары только 3, 4 и 5-го классов, можно использовать простое соотношение, облегчающее правильный выбор классов кинематических пар групп Ассура. Кинематическая группа не вносит избыточных связей при присоединии к механизму, если для нее выполняется соотношение:
 , где
, где  и
и  – число кинематических пар третьего и пятого класса группы Ассура;
– число кинематических пар третьего и пятого класса группы Ассура;  — число местных подвижностей ее звеньев.
— число местных подвижностей ее звеньев.
При  получим:
получим:  .
.
Данные соотношения будут выполняться и в том случае, когда все кинематические пары – четвертого класса, а местные подвижности звеньев отсутствуют. Приведенная зависимость позволяет правильно соориентироваться при выборе классов кинематических пар групп Ассура. Проверку структурных свойств полученного механизма и уточнение классов кинематических пар следует провести матричным методом.
Источник
Избыточные связи и лишние степени свободы в узлах и механизмах
При серийном производстве, особенно в автомобилестроении, технология сборки очень проста. Все, что требуется — это произвести сборку изделий путем их скрепления между собой, процесс не требует дополнительной ручной пригонки. Другое дело в индивидуальном производстве, даже несмотря на многопроходную обработку, точность деталей недостаточна и при сборочных операциях требует трудоемкой ручной пригонки. В таком случае процесс сборки (особенно крупных машин) становится очень продолжительным и зачастую неудачным — приходится сверлить новые отверстия, подстругивать, подтачивать и т.д. Особенно трудно точно выполнить размеры звеньев, так как звенья в большинстве случаев состоят из нескольких деталей и при их сборке допуски складываются. Важно выбирать схему механизма так, чтобы требования к точности звеньев были минимальны. Таким требованиям отвечают статически определимые механизмы (без избыточных связей), звенья которых самоустанавливаются.
Правило:
Избыточными связями называют такие связи, устранение которых не увеличивает подвижность механизма.
Во время работы размеры и положение звеньев может изменяться вследствие многих причин: температура, давление, неравномерность нагрузки, проседание почвы, нагрузки от ветра и т.д. Правильно спроектированные звенья, статически определимые, адаптируются к таким изменениям — в них не возникают дополнительные, трудноопределимые напряжения. Такие напряжения могут достигать больших величин и приводить к преждевременному выходу механизма из строя. Таким образом, статически определимые механизмы снижают трудоемкость при сборке, а также увеличивают надежность механизма в целом.
В кинематических парах избыточные связи безвредны, так как такие узлы, обычно, легко сделать с высокой точностью. Примерами таких механизмов являются зубчатые колеса с коэффициентом перекрытия >1, эвольвентные шлицевые соединения и т.д. Точность зубчатых колес, их шум и нагрузка, зависят от скорости вращения (в планетарных механизмах она очень велика). Правильным выбором кинематической схемы их можно значительно снизить.
В грузоподъемных механизмах такой принцип наиболее важен. В барабанах подъема, в опорах необходимо установить сферические подшипники, самоустанавливающиеся, а приводной вал отделить от барабана. Передавать вращение от приводного вала к барабану следует через зубчатое зацепление по типу зубчатой муфты. Такая компоновка позволяет барабану правильно работать и адаптироваться к изменениям независимо от приводного вала, а зубчатое зацепление будет компенсировать перекосы.
Достоинства механизмов, где выгода от применения таких систем, без избыточных связей, велика — в курсах теории механизмов и машин вообще не преподается.
В настоящее время создается множество механизмов с избыточными связями, конструкторы которых не знакомы с теорией структуры механизмов.
Рассмотрим некоторые механизмы без избыточных связей на нескольких примерах:
1. Всем известный кривошипно-шатунный механизм любого двигателя внутреннего сгорания, в нем поршень прикреплен к одному шатуну. Шатун накладывает четыре связи на поршень, пятая приобретается малым осевым зазором между ним и поршнем. Этих связей достаточно для работы механизма, шестая связь будет блокировать вращение поршня в головке шатуна. Такая схема допускает изменения длины шатунов от номинала в пределах большого допуска, на работоспособность ДВС это не отразится. Допустим, по каким-то причинам нам потребовалось к поршню (ползуну) прикрепить несколько шатунов, тогда разница длины шатунов должна лежать в пределах нескольких микрон, иначе нагрузка между ними будет неравномерной, что приведет к лишним напряжениям и перекосам.
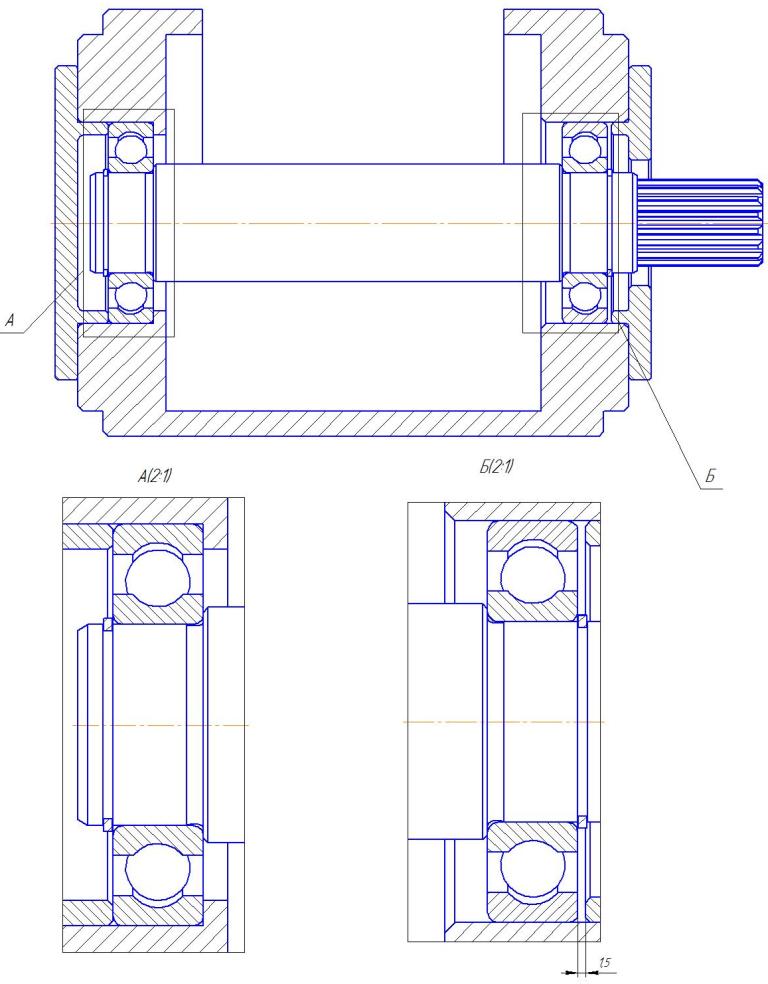 |
| Рисунок 1 |
2. Еще пример, вал на нескольких (на двух) подшипниках (рисунок 1), такая компоновка требует, чтобы один подшипник был свободен (выносной элемент Б), а второй заневолен (выносной элемент А), как показано на рисунке. Такая схема позволяет установить их с большими допусками (несколько миллиметров). В этой схеме есть один недостаток — упорный буртик подшипника ((выносной элемент А) выполнен в корпусе, что не позволяет изготовить отверстия подшипников за одно, в один проход.
Другое дело, если на один вал установлены три подшипника (рисунок 2). Когда вал установлен на три подшипника, то независимо от их исполнения точность установки измеряется уже микронами. Это получается потому, что каждая опора накладывает на вал четыре связи. В этом примере механизм является статически неопределимым. В нем передаваемые силы зависят от деформаций звеньев. Так как эти деформации очень малы, то размеры звеньев необходимо выполнять с большой точностью, иначе звенья будут работать навстречу друг другу и передавать очень большие усилия, что приведет к перегреву механизма, увеличению трения, снижению КПД, а иногда и к невозможности сборки.
 |
| Рисунок 2 |
В качестве примера такого механизма возьмем газораспределительный механизм, распределительный вал которого вращается на нескольких подшипниках (обычно 4 или 5). Нормальная работоспособность такого механизма достигается только высокой точностью изготовления как самого вала, так и подшипников, поэтому стоимость распределительного вала очень высока.
3. Многие знают, как качается на кухне стол и для того, чтобы он не качался, устанавливают под одну из ножек сложенную газету или спичечный коробок. Такое поведение стола как раз вызвано избыточностью одной ножки. Именно поэтому все рояли имеют три ножки.
Как показывает этот принцип, статически неопределимые звенья применять нежелательно. Исключение необходимо делать только в том случае, если в них установлены пружины или звенья работают на изгиб с большими деформациями.
Если механизм статически определим, то размеры звеньев почти не влияют на передаваемые силы, поэтому допуски на размеры могут лежать в больших пределах. К этому необходимо стремиться всем конструкторам.
Приведенные примеры позволяют сформулировать два основных правила конструирования самоустанавливающихся механизмов:
Каждый вал необходимо устанавливать на два подшипника;
Недопустимо применять сдвоенные механизмы, при одинаковых начальных и конечных звеньях нельзя между ними устанавливать два передаточных механизма.
Автор статьи: Vdovinea
(Статья написана с использованием трудов Решетова Л.Н.)
Источник