
- Робот-жук: как сделать самодельного таракана из конденсатора и вибромотора
- Шаг 1: Соберите нужную электронику
- Шаг 2: Отрежем кусочек макетной платы
- Шаг 3: Припаиваем конденсаторы и пины хедера
- Шаг 4: Припаиваем моторчик
- Шаг 5: Припаяйте усики и ножки
- Шаг 6: Припаиваем коннекторы к заряднику
- Шаг 7: Зарядка и тестирование робота-насекомого
- Шаг 8: Рекомендации по пайке
- Механический таракан своими руками
Робот-жук: как сделать самодельного таракана из конденсатора и вибромотора
Если вы умеете паять, то этот небольшой проект отнимет у вас около 20 минут. Самодельный робот-таракан использует вибромотор в качестве своей головы, мотор питается от конденсатора, который также является и брюшком насекомого, в спецификации указаны следующие параметры конденсатора: 2.8V 5F, вы можете купить такой за 100-150 рублей.
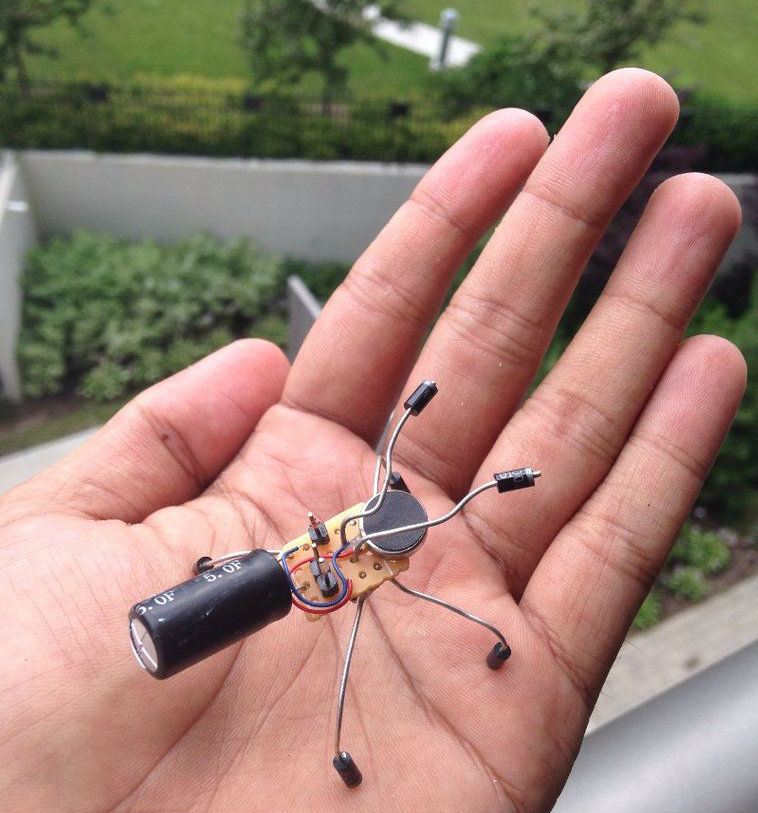

В качестве лапок и усиков можно использовать диоды или резисторы. Все эти компоненты спаиваются вместе на одной небольшой печатной плате, которая также является и грудной клеткой насекомого.
Так как в качестве источника питания микроробота используется суперконденсатор, то для питания нам понадобятся две батарейки AA (как показано в видео выше).
Шаг 1: Соберите нужную электронику


Для насекомого нам понадобится:
- Вибромотор (Adafruit)
- Суперконденсатор 2.8V 5F — я нашел свой в старом игрушечном самолёте
- Пины хедеры-папы
- Джамперы (Adafruit)
- Макетная плата (Ebay)
- 2 батарейки AA
- Отсек для батареек AA, желательно с выключателем
- Джампер-мама для припаивания к проводу из отсека батареек
- Термоусадочная трубка
В дополнение к компонентам, вот список приспособлений, нужных для завершения проекта:
- Припой
- Паяльник
- Рука-помощник для паяльника
- Ножницы
- Плоскогубцы
- Кусачки
Шаг 2: Отрежем кусочек макетной платы
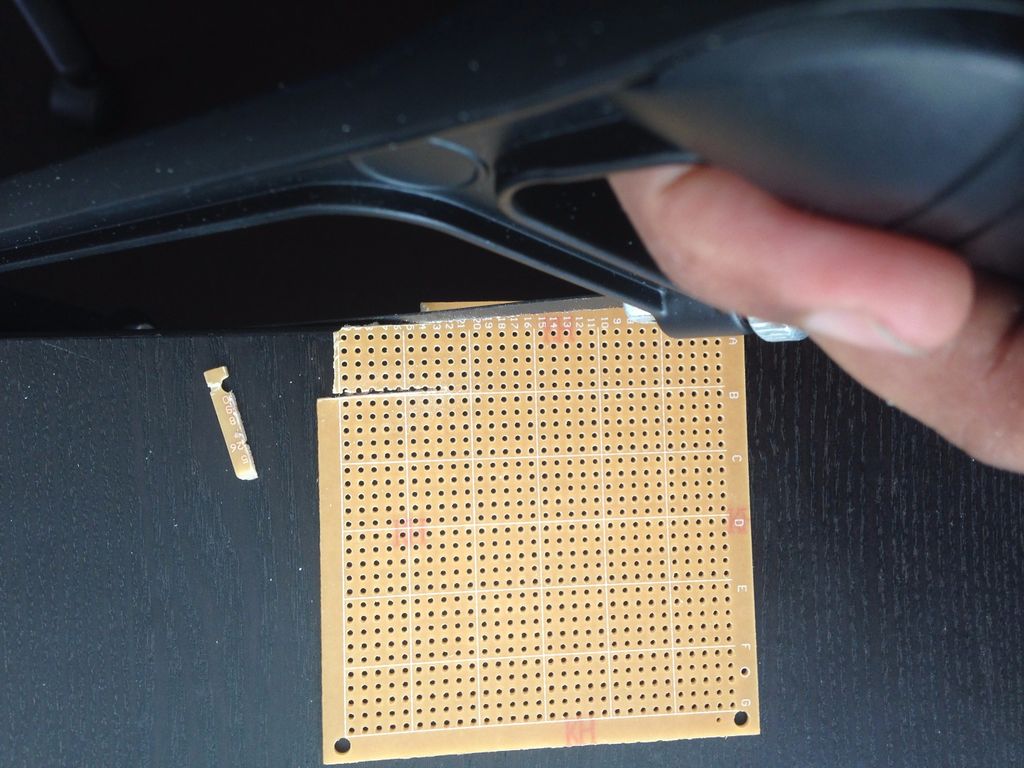
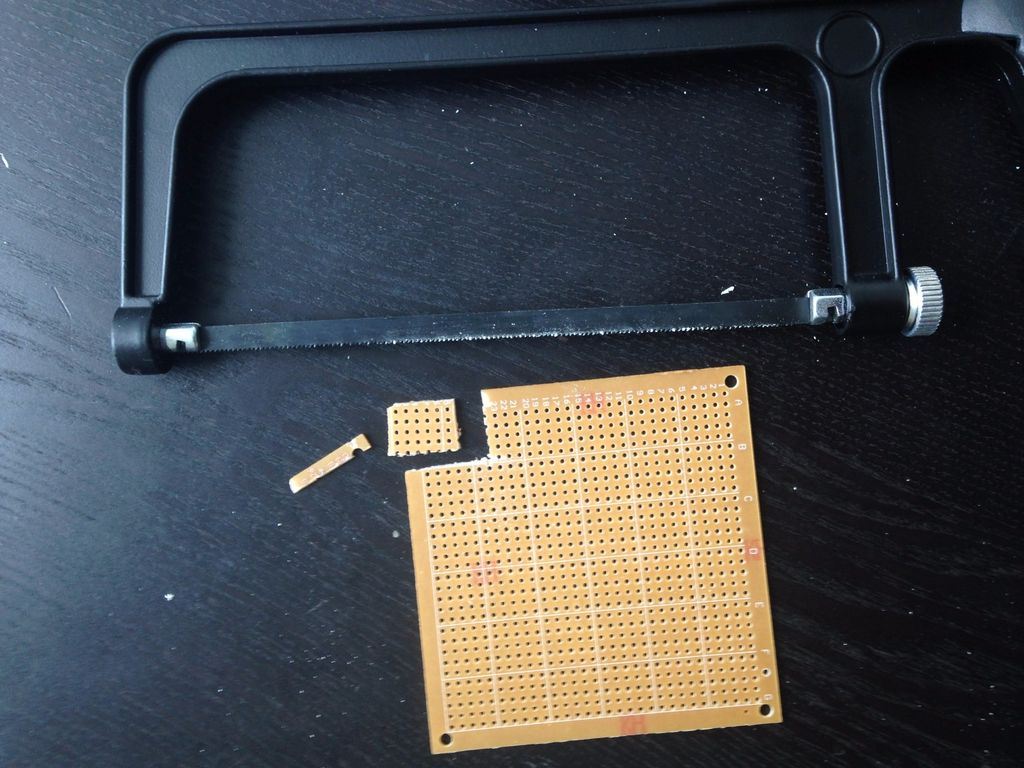

Отрежьте небольшой кусок макетной платы, вам понадобится как минимум размер 4*6 отверстий, как показано на фото. Если вы не слишком ловко паяете, то лучше вырезать кусочек 8*5 и у вас будет больше пространства для манёвров.
В дополнение отрежьте небольшой хедер, вам нужно будет две части, одна с двумя пинами, а другая с одним пином.
Шаг 3: Припаиваем конденсаторы и пины хедера

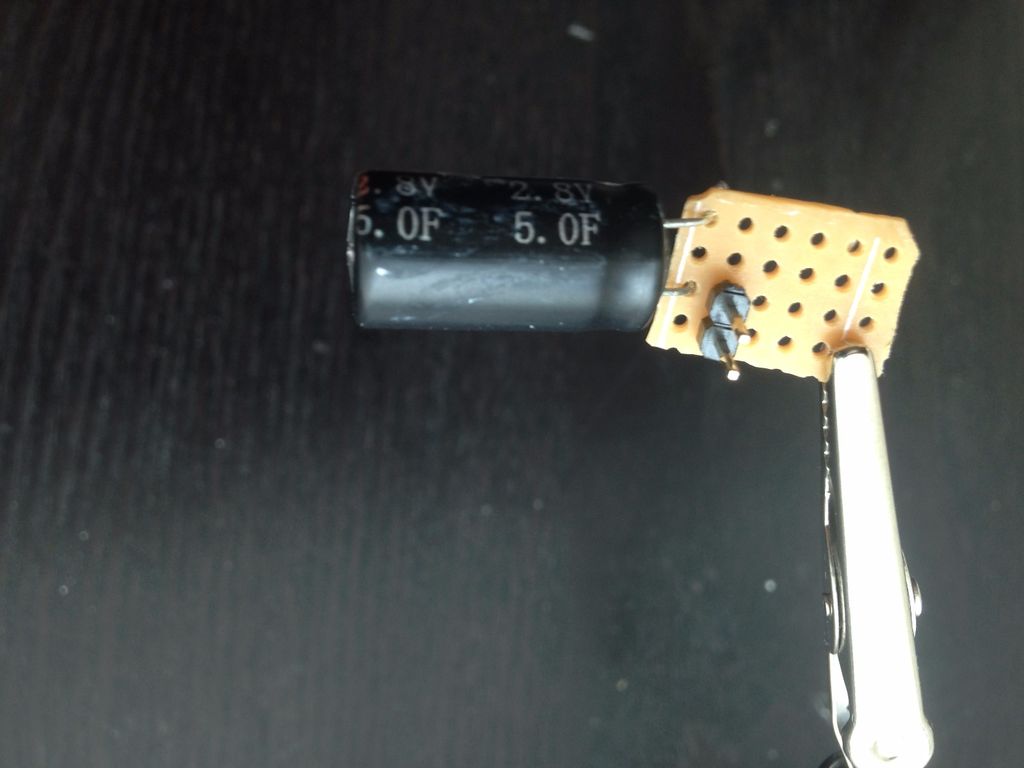
Припаяйте конденсатор к одному концу платы, как показано на картинке. Удерживая плату плоскогубцами, припаяйте хедер на нужное место (смотрите картинку), после этого соедините внутренний верхний пин с положительной ножкой конденсатора.
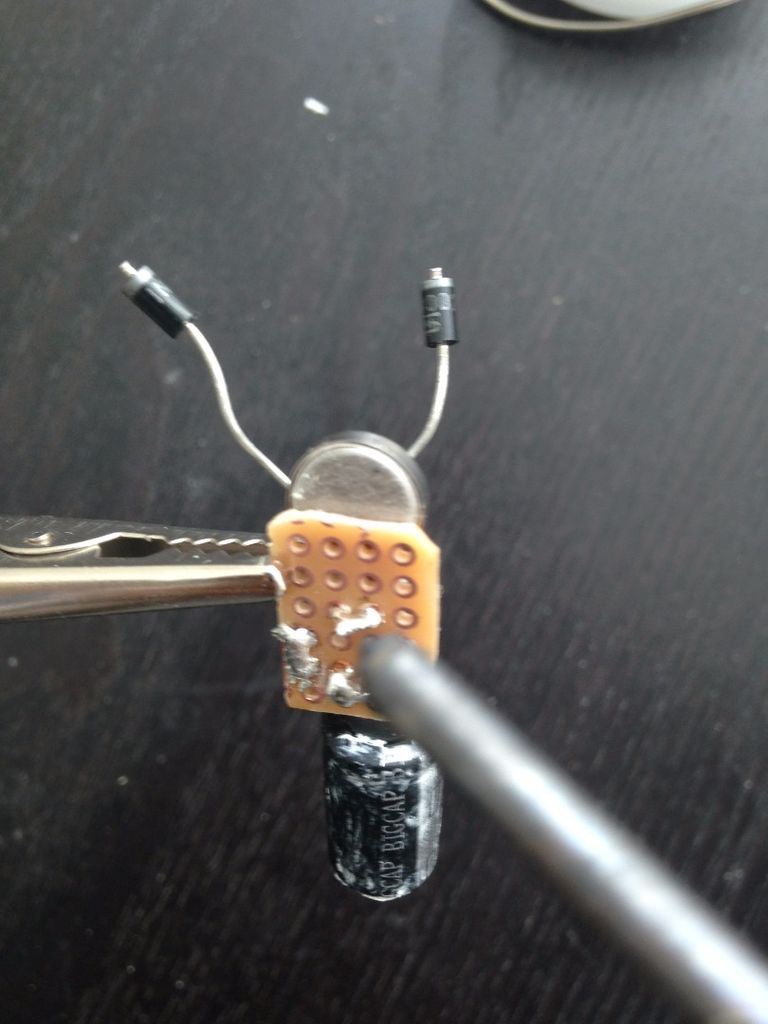
Шаг 4: Припаиваем моторчик
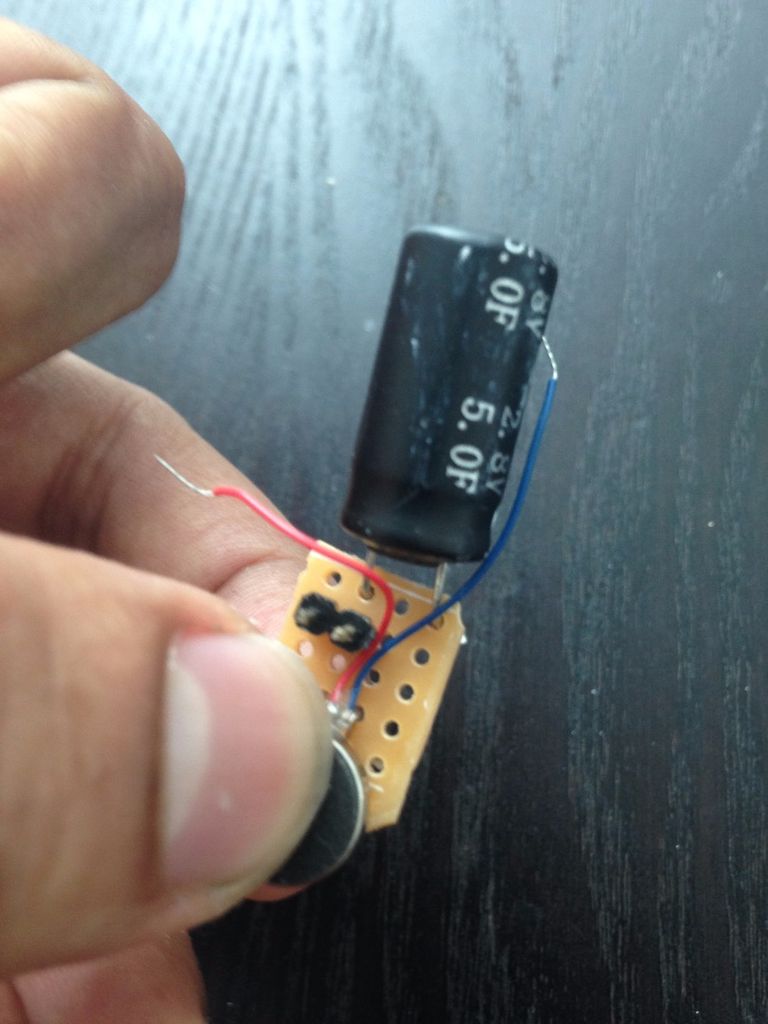



Счистите плёнку с липкой стороны моторчика и приклейте его к плате как показано на первой картинке.
Проденьте положительный красный провод вокруг пинов хедера (если провод лишком длинный) и припаяйте его ниже верхнего внешнего пина.
Теперь припаяйте отрицательный синий провод сразу ниже отрицательного от конденсатора. Затем припаяйте одиночный пин хедера ниже синего провода, как показано на четвёртой фотографии.
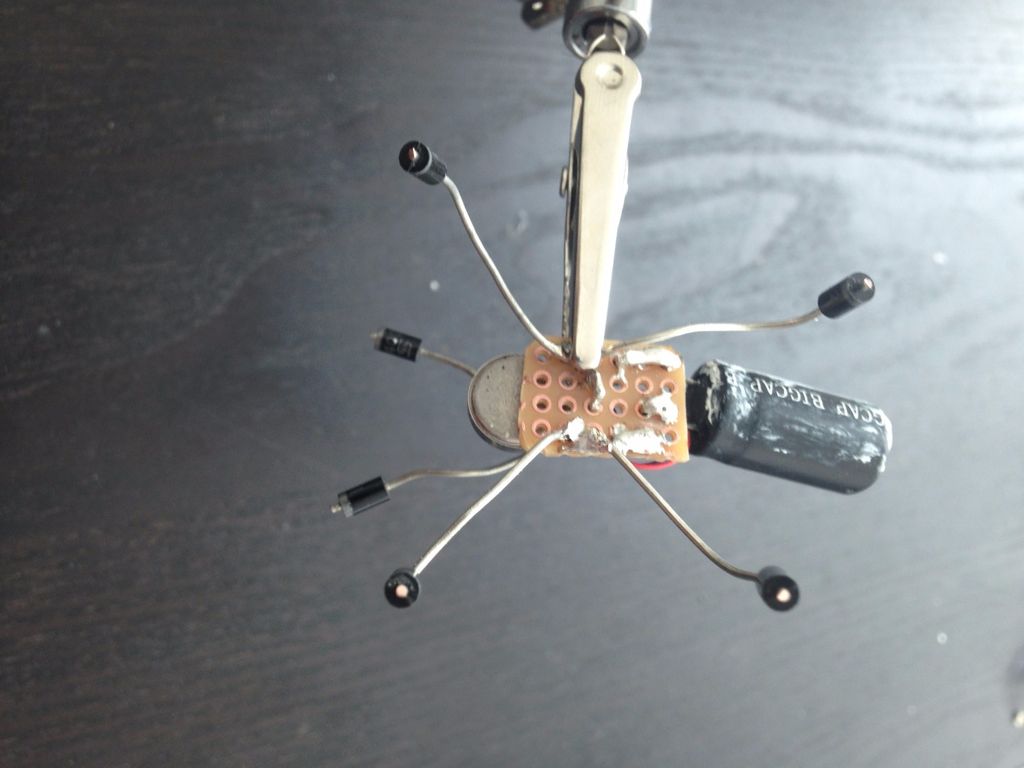
Шаг 5: Припаяйте усики и ножки
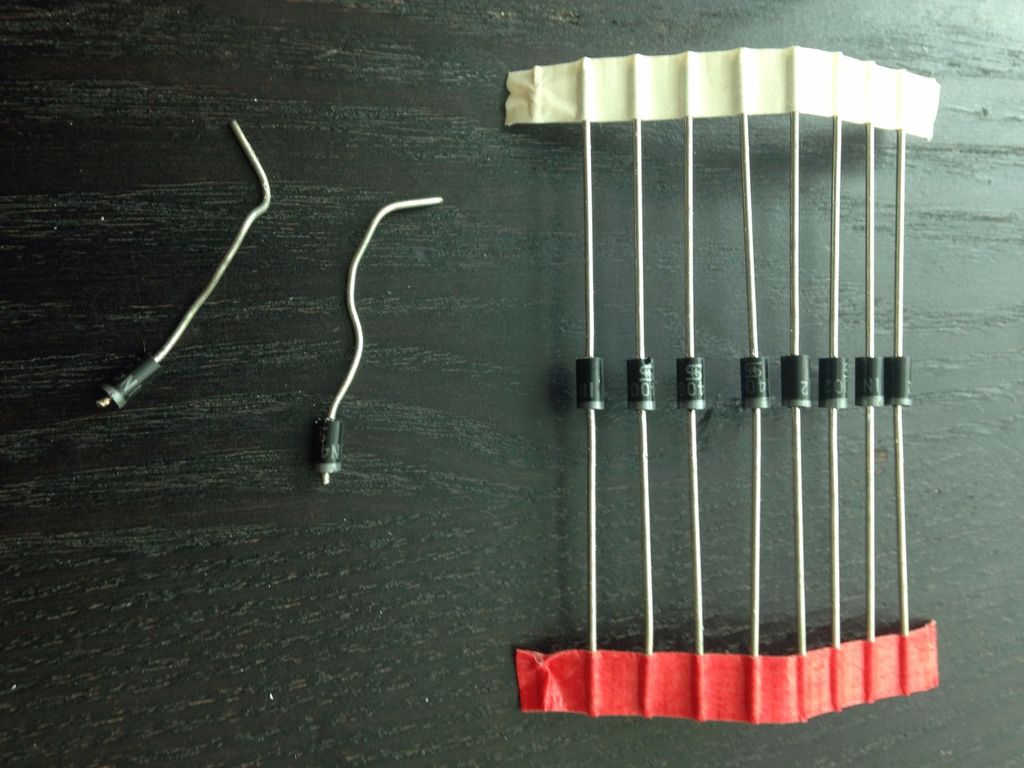

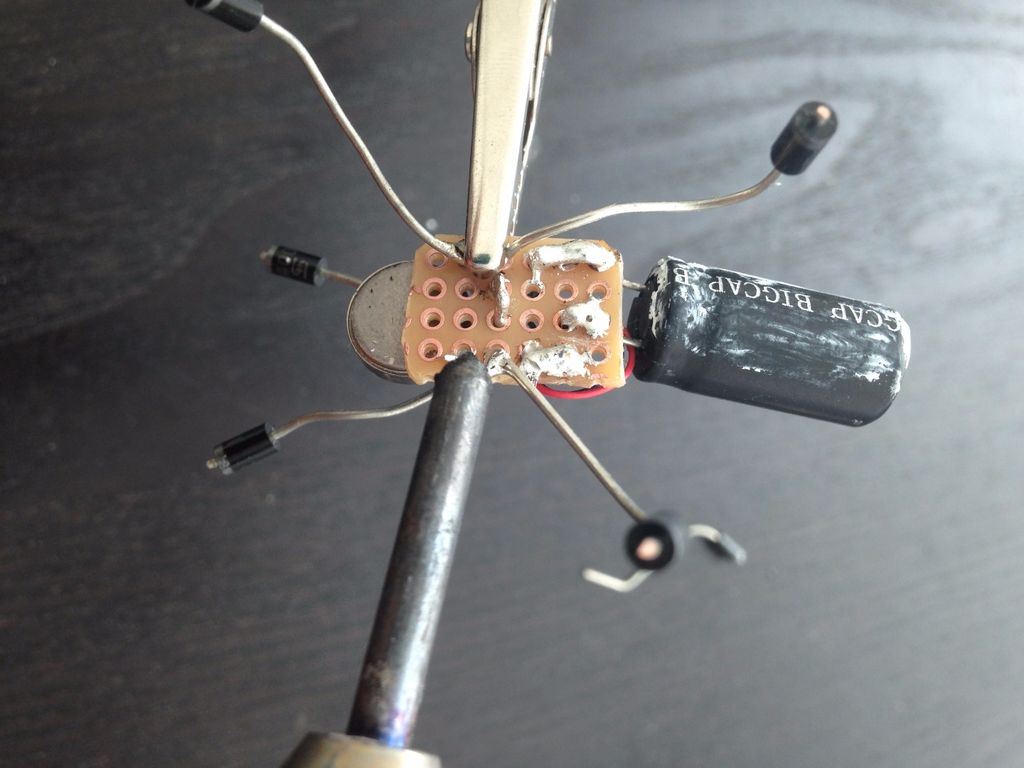
Для ножек и усиков можно использовать диоды и резисторы. Я использую диоды и буду писать о них. Ножницами обрежьте 6 диодов, как это показано на фотографии. Припаяйте два диода сразу ниже вибромотора — они будут играть роль усиков насекомого. Затем припаяйте 4 остальных диода в качестве ножек насекомого (как показано на картинке сверху).
Шаг 6: Припаиваем коннекторы к заряднику

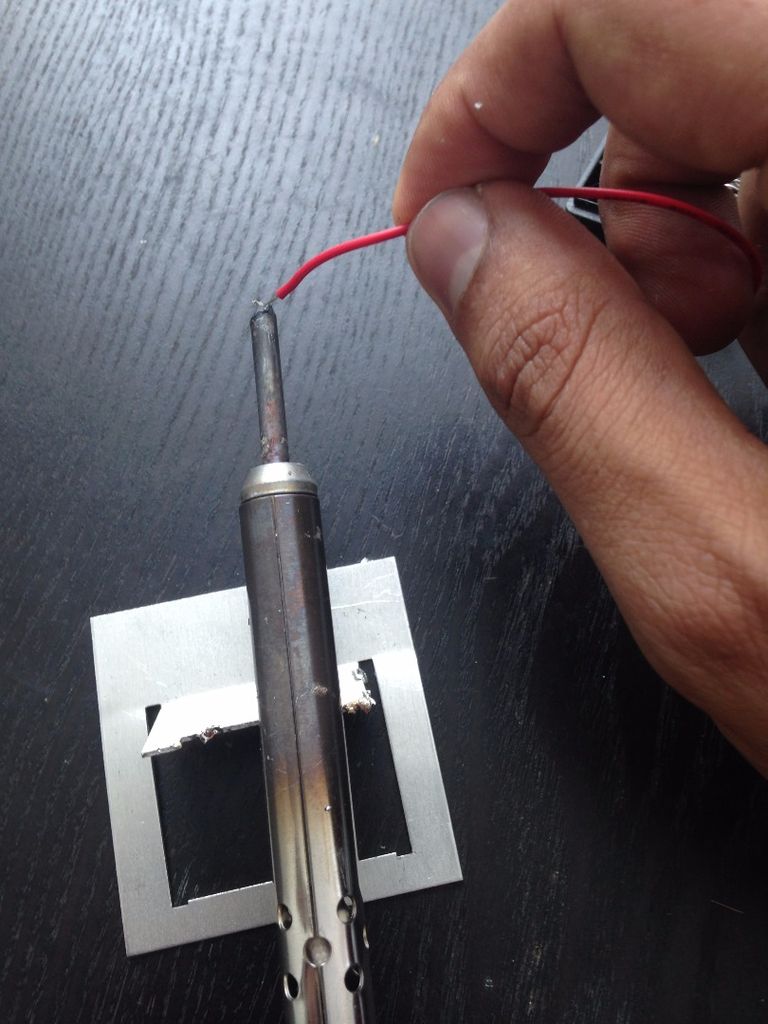
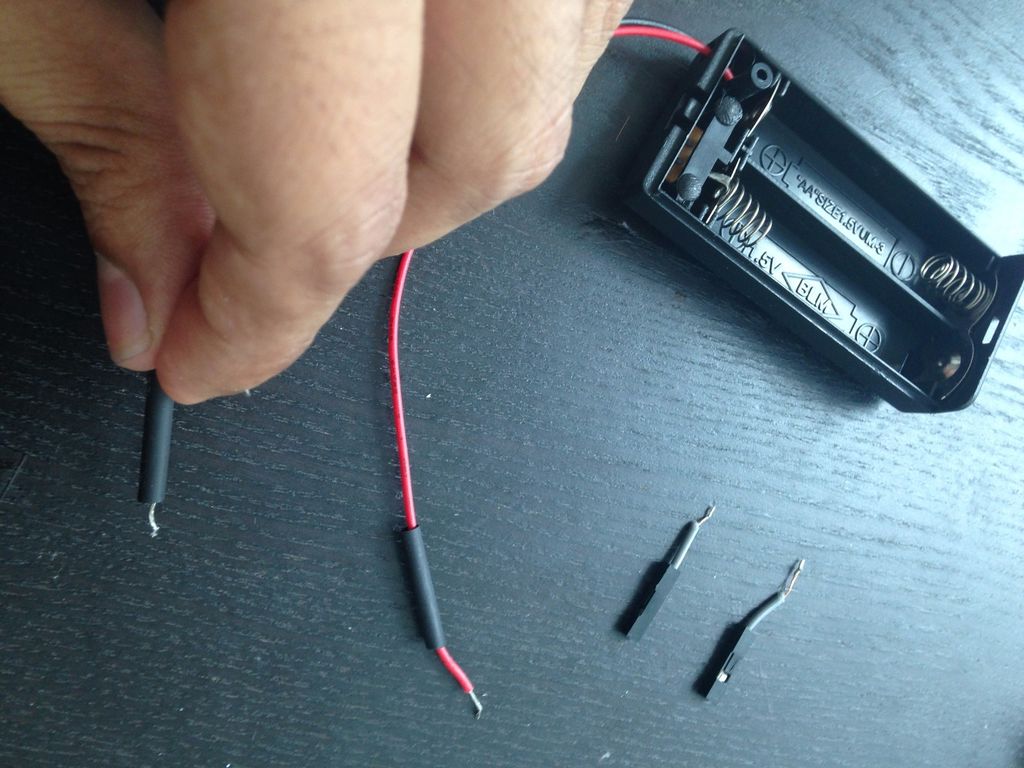
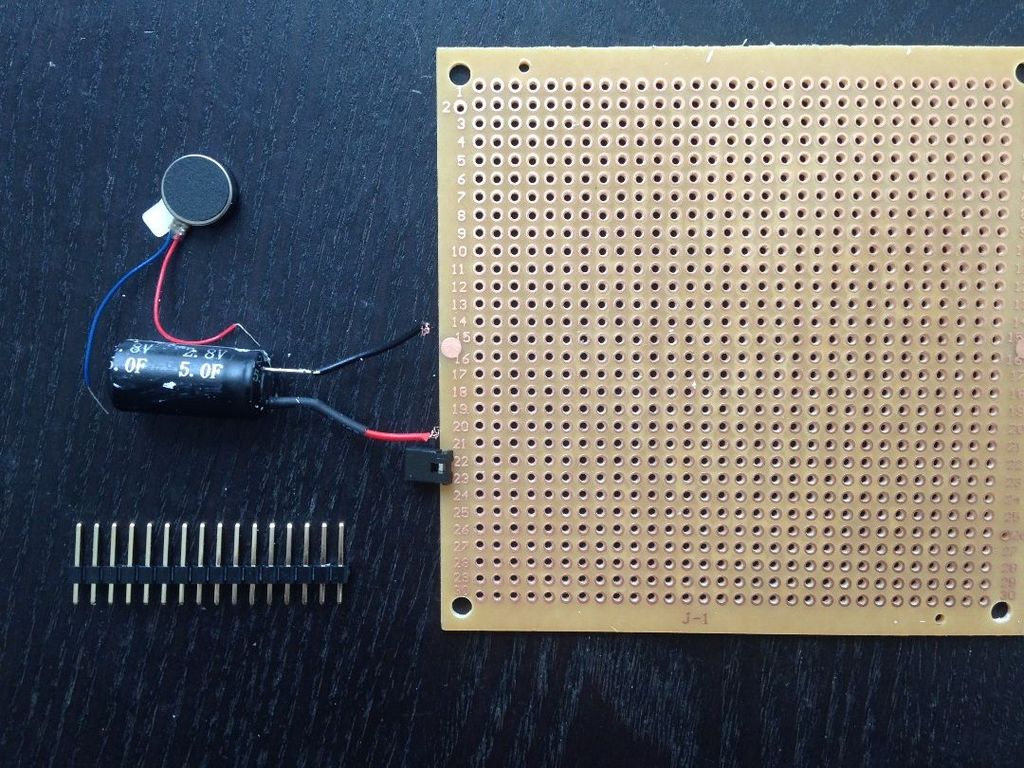
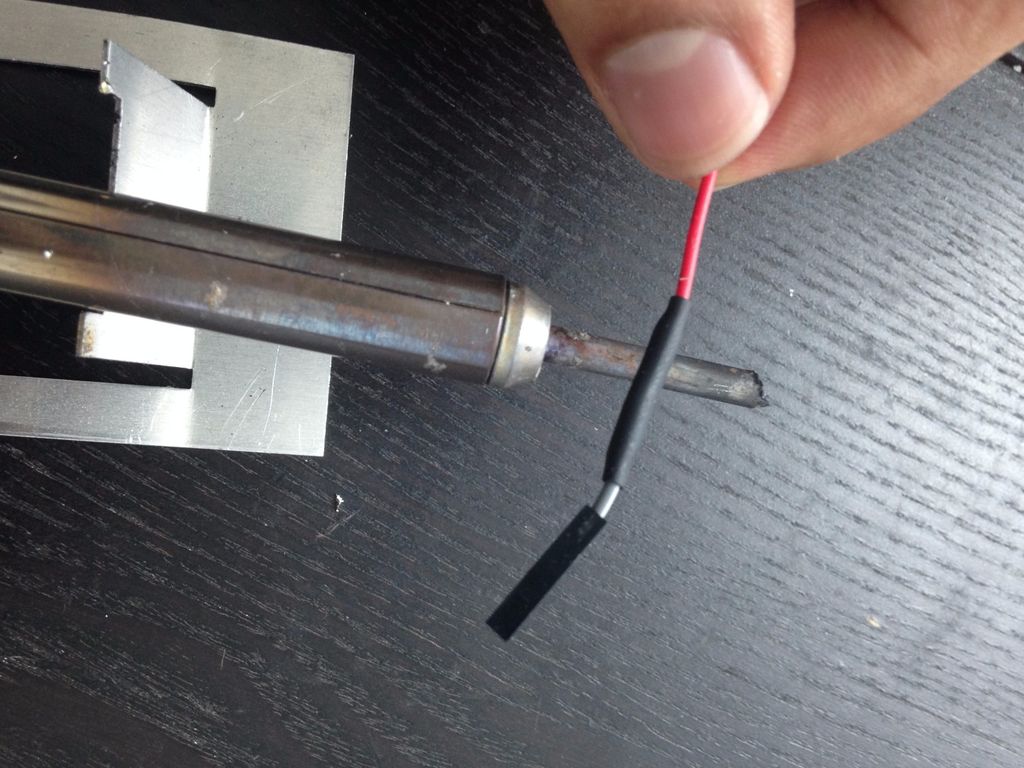
Чтобы создать зарядник для конденсатора, обрежьте концы джамперов-мам на кабелях, оголите и залудите концы поводов на проводах и отсеке батареек. Отрежьте два кусочка термоусадки и оденьте их на провода отсека батареек, как показано на картинке. Припаяйте джамперы-мамы к концам проводов отсека батареек. Используя источник тепла изолируйте соединение термоусадкой.
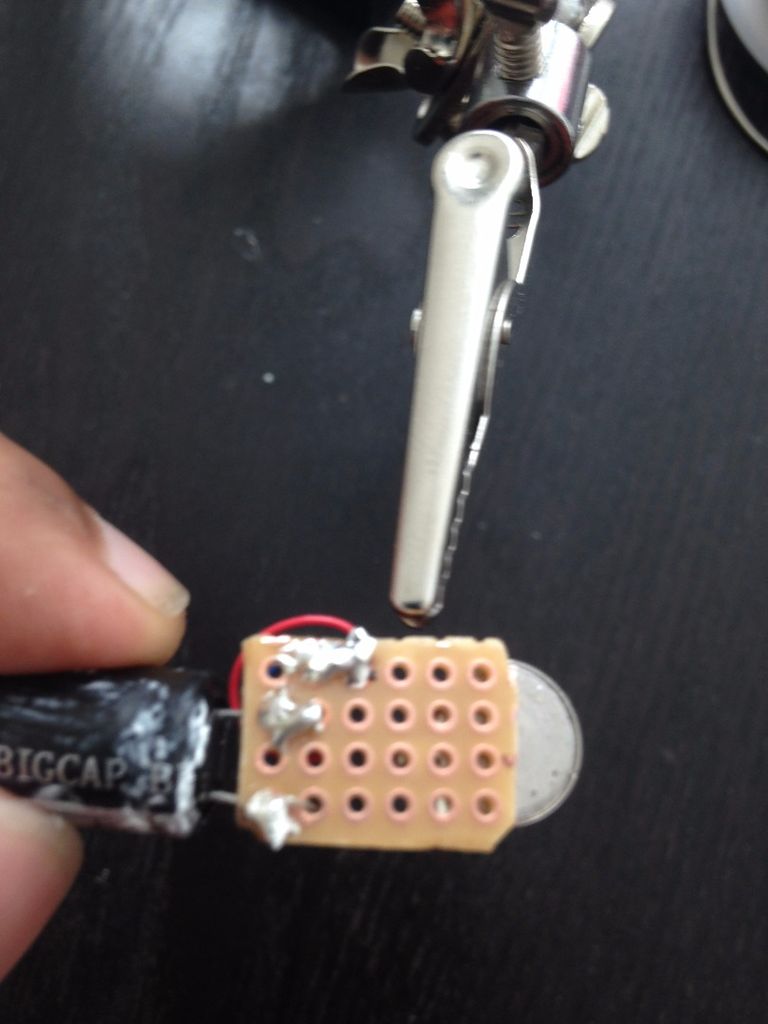
Шаг 7: Зарядка и тестирование робота-насекомого
Чтобы зарядить суперконденсатор, соедините отсек батареек с пинами, которые находятся сразу ниже конденсатора на плате насекомого (если отсек со включателем — включите его).
Как только вы подали питание, посчитайте до 10 и отключите его. Теперь используйте джампер, чтобы соединить два пина, как показано в приложенном видео и смотрите, как ваш микро-робот начал двигаться по столу.
Шаг 8: Рекомендации по пайке

Если вы всё делали правильно и дошли до этого шага — поздравляю вас, вы создали робота-жука.
Я приложу несколько советов по пайке элементов:
- Перед спаиванием двух проводов, обязательно залудите их
- Как только вы припаяли компонент, например конденсатор или диод, слегка покачайте его, чтобы проверить, что он надёжно держится на месте.
- Если по какой-то причине вы допустили ошибку при спайке, всегда лучше отпаять элемент при помощи паяльной станции или нагрева, а затем использовать свежий припой для создания нового соединения, вместо того, чтобы пытаться восстановить плохое соединение.
- Как только вы закончили паять, всегда чистите носик паяльника
- Для термоусадки — вместо использования зажигалки или пламени, просто прокрутите трубку над кончиком паяльника, как показано на картинке.

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Источник
Механический таракан своими руками
Механический таракан – это конструкция, которая весьма популярна среди любителей мастерить своими руками. Такие механические тараканы — прекрасный способ вызвать интерес к творчеству среди подрастающего поколения.
Его походка очень схожа с настоящим тараканом. При ходьбе немного раскачивается шагая уверенно вперед. Таракан имеет минимум сложных деталей и очень прост в изготовлении.
1.Видеотест
На видео показан механический таракан с разных ракурсов во время его работы и передвижении.
2. Характеристики и особенности.
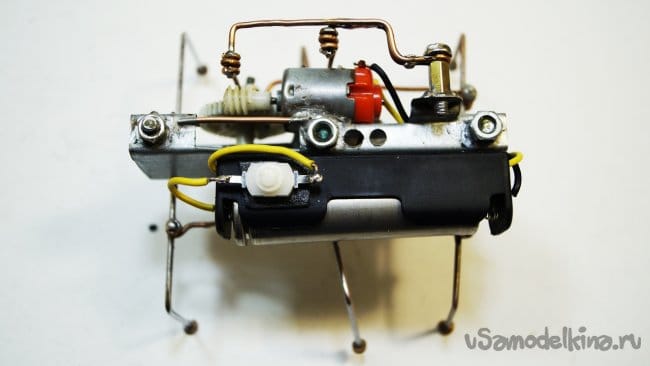
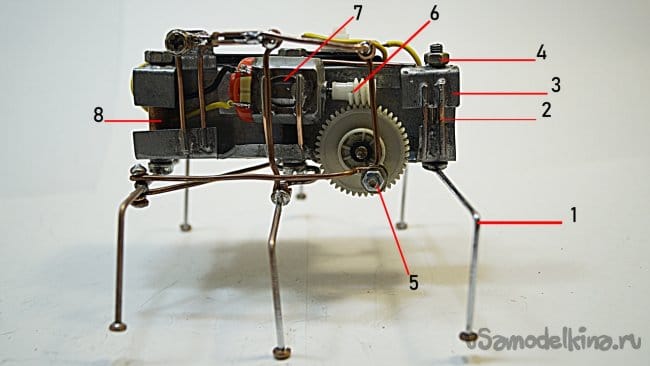
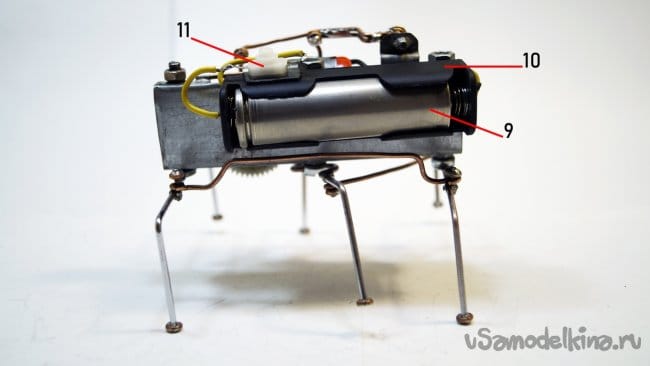
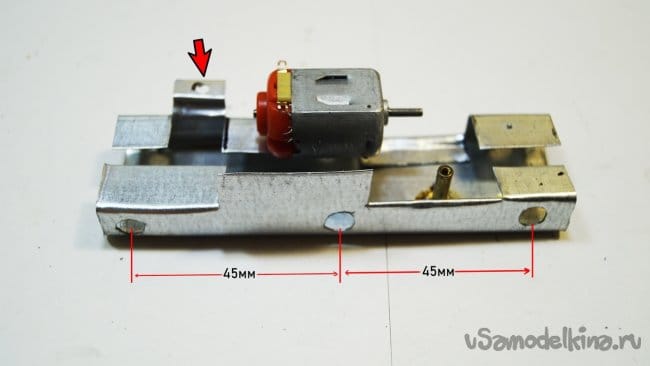
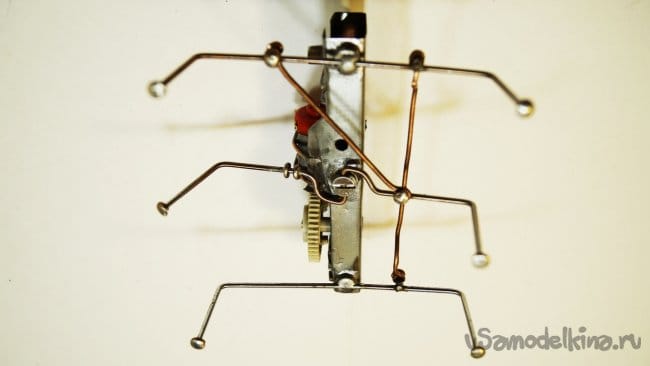
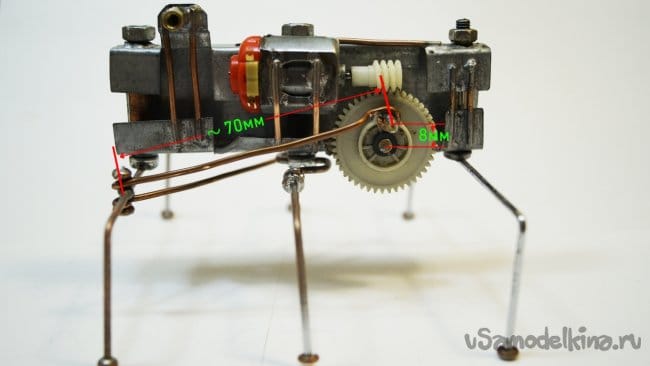
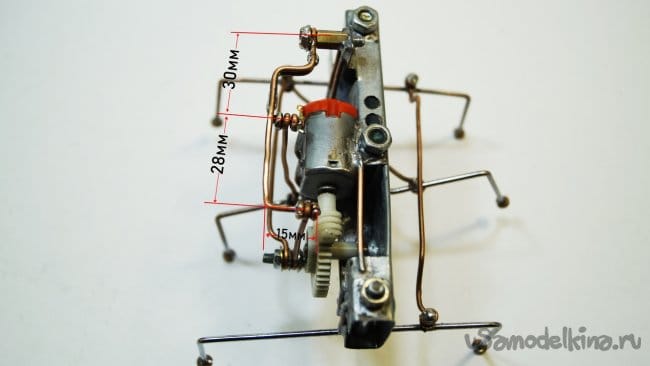
На фото 1. Показан Механический таракан, вид сбоку. На фото 2. Показан вид сверху.
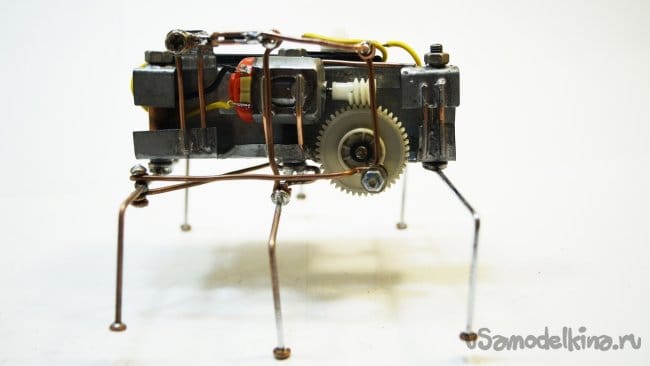
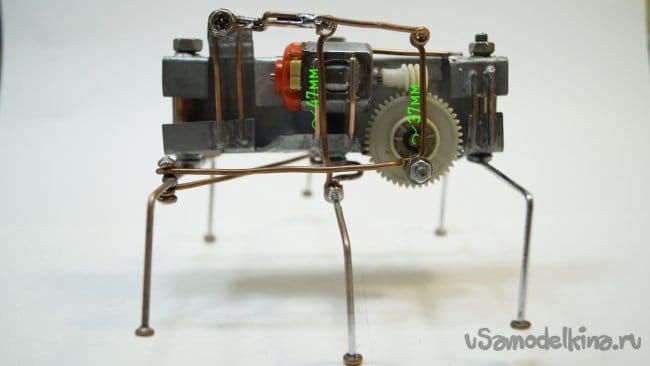
КОНСТРУКЦИЯ. В качестве рамы использован профиль ппн-2 30Х20. Крепление двигателя и других соединений произведено с помощью пайки. Лапы таракана крепятся болтами М6. Кнопка включения и отсек для батареек приклеены на двухсторонний скотч. В качестве тяги для привода лап таракана использован медный кабель сечением 2,5мм.
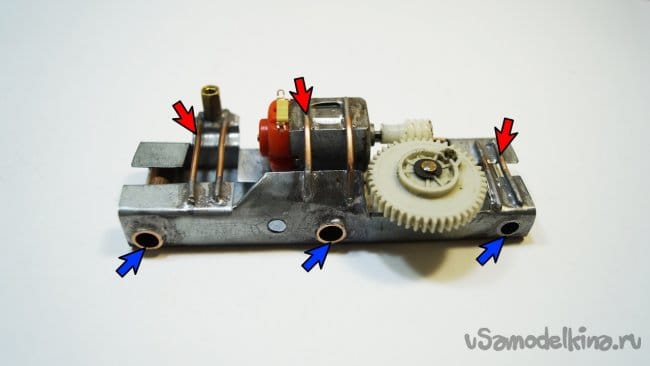
МОТОР И КРИВОШИП. Моторчик и ось кривошипа припаяны к раме на ПОС-61, паяльная кислота ZnCl (Хлористый цинк). Для увеличения крутящего момента и уменьшения габаритов, была использована червячная передача.
ПИТАНИЕ. В качестве питания робота был использован аккумулятор 18650. Источник питания 3,7В.
ДЕТАЛИ КОНСТРУКЦИИ РОБОТА
1. Лапы таракана.
2. Ребро жесткости.
3. Рама.
4. Ось лап таракана.
5. Кривошипный механизм.
6. Червячный привод.
7. Электродвигатель F130 5 В.
8. Втулка оси лап таракана.
9. Аккумулятор типа 18650, 3.7 В.
10. Батарейный отсек.
11. Кнопка включения.
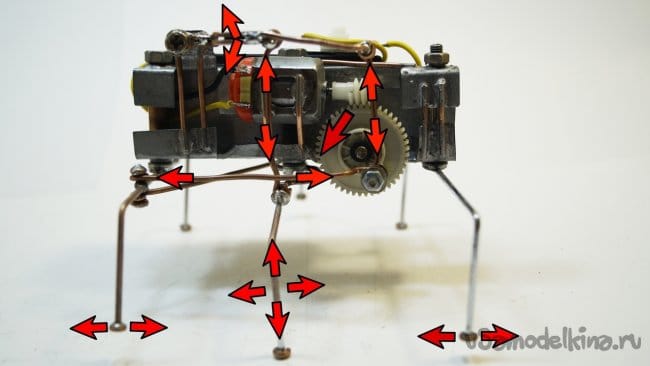
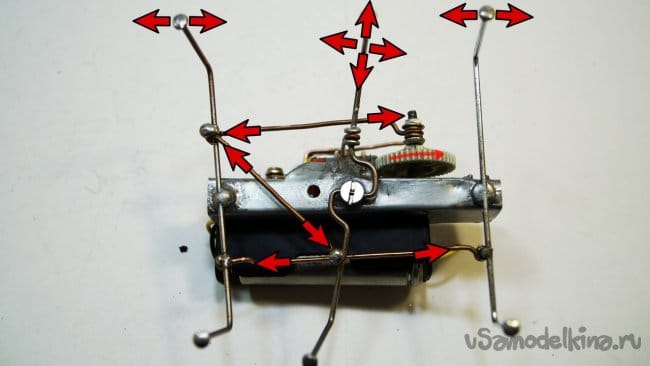
3. Принцип работы.
На фото 3. 4. Показан принцип работы механических частей таракана. Стоит помнить, что передние и задние лапы робота, движутся по горизонтальной плоскости, а средние лапы движутся по вертикальной и горизонтальной плоскости.
На электродвигатель через ключ поступает питание, двигатель вращает кривошипный механизм. Кривошип приводит в движение через тягу переднюю лапу, соответственно от передней лапы тяга толкает заднюю лапу (они движутся синхронно). Средняя пара лап соединена с первой парой, накрест (они движутся в противофазе).
Для движения средней пары лап вертикально, над моторчиком установлен рычаг, который приводится в движение от кривошипного механизма.
4. Материалы и инструмент.
1.Паяльник 50Вт.
2.Батарейный отсек.
3.Припой ПОС-61.
4.Медный провод сечением 2.5 мм.
5.Паяльная кислота ZnCl (Хлористый цинк)
6 .Электромотор F130 5В.
7.Ножницы по металлу.
8.Червячный привод.
9.Плоскогубцы.
10.Стальная трубка, диаметром 80мм.
11.Аккумуляторная батарея 18650.
12.Профиль ппн-2 30Х20.
А также: (кнопка включения, двухсторонний скотч, провод монтажный)

5. Инструкция по сборке.
1.Изготовление рамы таракана.
Рисуем на профиле разметку как указано на Фото 5.
Фото 5.
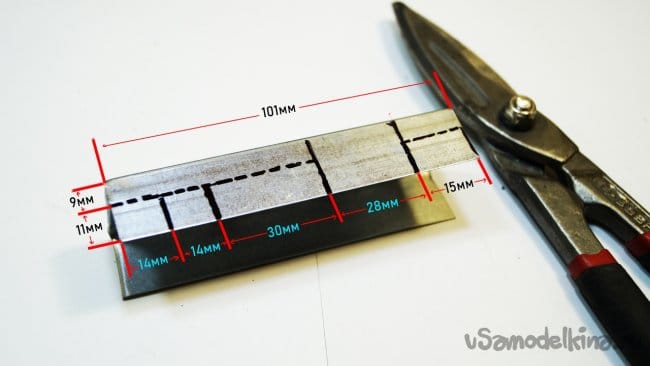
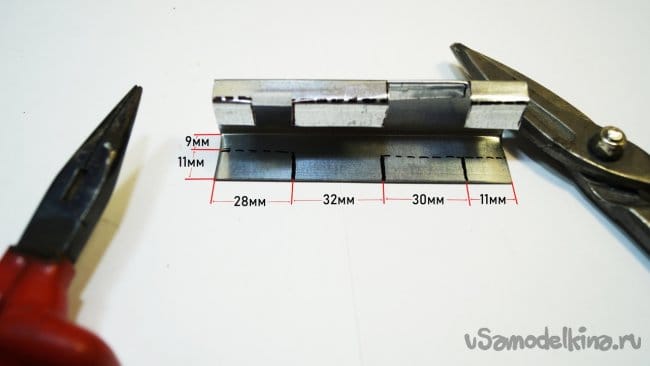
С помощью ножниц по металлу, отрезаем и загибаем заготовку плоскогубцами как указано на фото 6. Размечаем нижнюю часть как указано на фото 6. Загибаем профиль плоскогубцами как на фото 7.

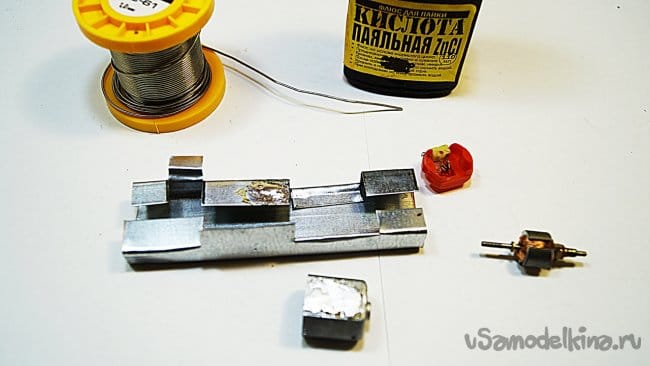
Спаиваем корпус электромотора и рамы вместе, хорошо прогревая детали паяльником прижав их друг к другу Фото 9. БУДЬТЕ АККУРАТНЫ, ДЕТАЛИ СИЛЬНО НАГРЕВАЮТСЯ.
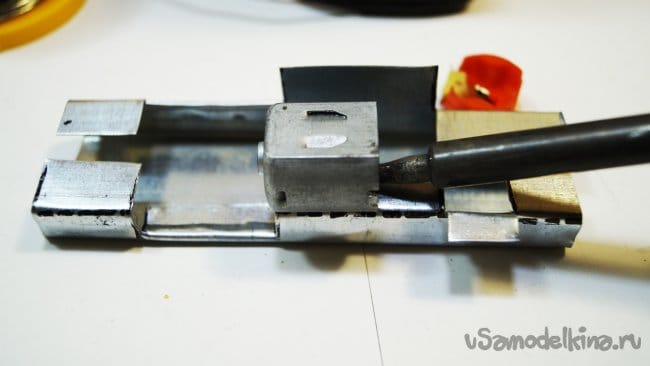


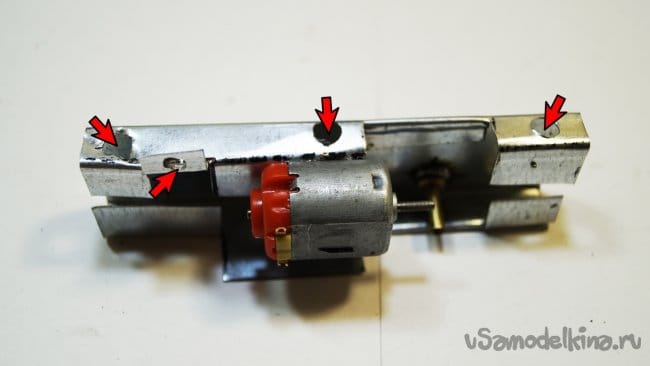
Также припаиваем на ушко за электромотором гайку. На эту гайку будет крепиться рычаг, отвечающий за подъем средних лап по вертикальной оси
Для усиления конструкции рамы, были припаяны ребра жесткости медным проводом сечением 2,5мм.
Также были впаяны втулки 8мм в места крепления лап таракана Фото 15.
4. Лапы таракана.
В качестве лап таракана использована металлическая проволока диаметром 3мм, она припаяна к головке болта М6 Фото 16. Средняя пара лап таракана выполнена по-другому, в головке болта высверливается отверстие по диаметру проволоки. Проволока загибается в виде буквы “S”, это даст возможность лапам таракана двигаться вертикально Фото 17.


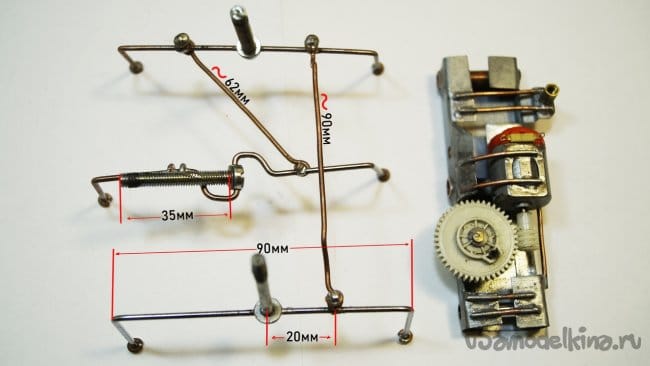
Изготавливаем из медной проволоки рычаг для движения средних лап вертикально Фото 21.22.
На этом механическая часть таракана закончена.
5. Электрическая часть.
Батарейный отсек приклеиваем на двухсторонний скотч к раме таракана. Кнопку включения приклеиваем на батарейный отсек. Спаиваем все элементы Фото 23.
Источник